
Stepper Motorized 3-axis Robot Arm
Alvis3 3-axis stepper motorized robot arm
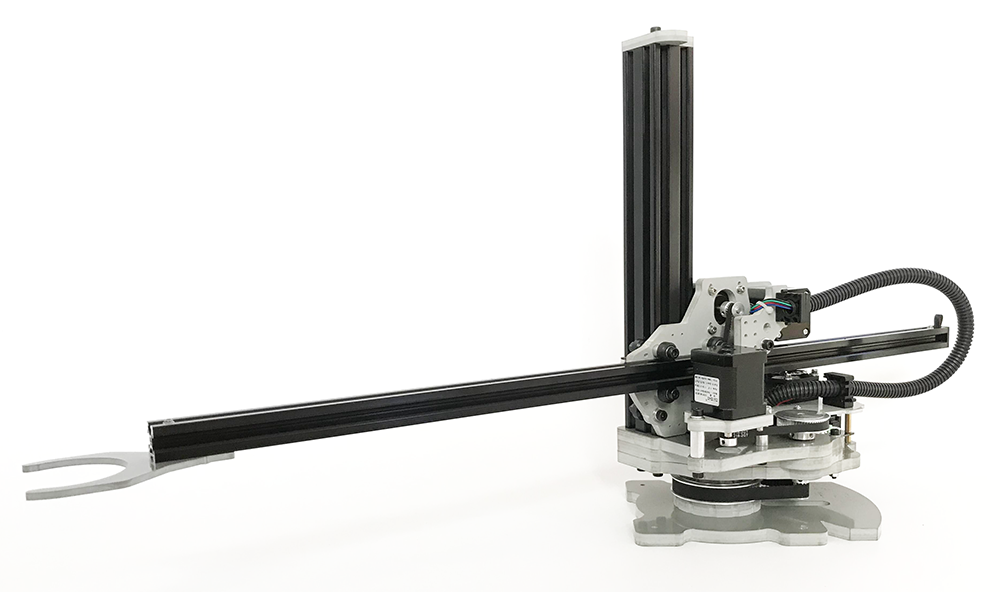
Number of axes Three axes X rotation axis, Y horizontal telescopic axis, Z vertical lift axis
Machine outline size
(Without end effector) L = 800mm
H = 390mm
W = 145mm
Working radius r = 650 mm
Minimum working radius r = 130mm
Lifting stroke MaxTop – MinTop = 200mm
Robot arm weight 4.3kg
End load 600g (including the weight of the actuator)
Working environment voltage INPUT: AC100 ~ 240V 50 \ 60Hz GB
OUTPUT: 12V 6A
Round trip accuracy Load round trip accuracy <= 1mm
Fastest speed acceleration X axis: 12000 degrees / minute, acceleration: 500 degrees / second square
Y axis: 20000mm / minute, acceleration: 1000mm / second square
Z axis: 10000 mm / minute, acceleration: 500mm / second square
Material The main sheet material is PVC engineering plastic
End effector without standard
Fixed installation 4 m4 mounting holes are reserved in the base
Limit switch X axis without
Y axis min + max micro switch limit
Z axis maximum micro switch limit
Control method The upper computer sends G code through the serial port, and the lower computer Grbl interprets and executes the G code.
The host computer can be a computer or a microcontroller
PC software Grbl Controller (free software)
Control command X in G code is the rotation angle value of the base, unit degree
Y is the telescopic amount of the horizontal arm, the unit is mm
Z is the lifting distance in mm
Controller chip ATMMEGA328P
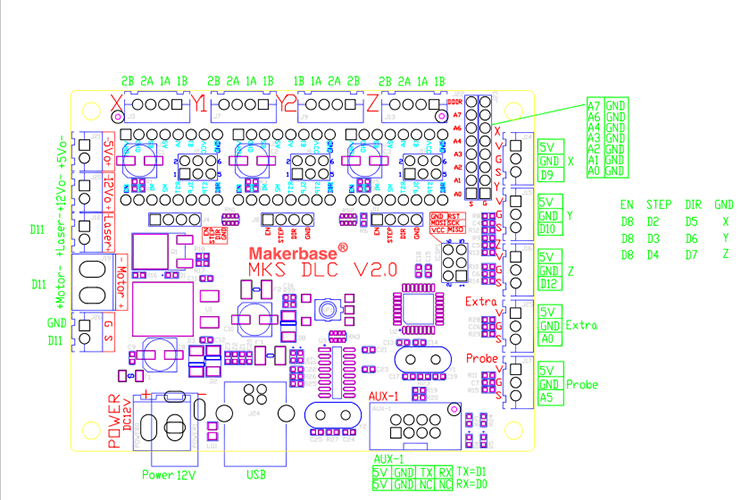
Driver chip A4988
Computer wiring USB cable, AM ~ BM (square mouth) 1.5 meters
Power peak 72W
Lower computer system Grbl1.1
Control command G code
Expandable ports TXRX, D11, A0, A4, A5
12V output port, such as relay, solenoid valve, etc., open or close with M command







