The relationship between three common closed-loop modes and FOC control
It's important to clarify the relationship between "three common closed-loop modes" and "FOC control" They are not equal, but rather deeply interconnected, especially in high-performance servo systems.
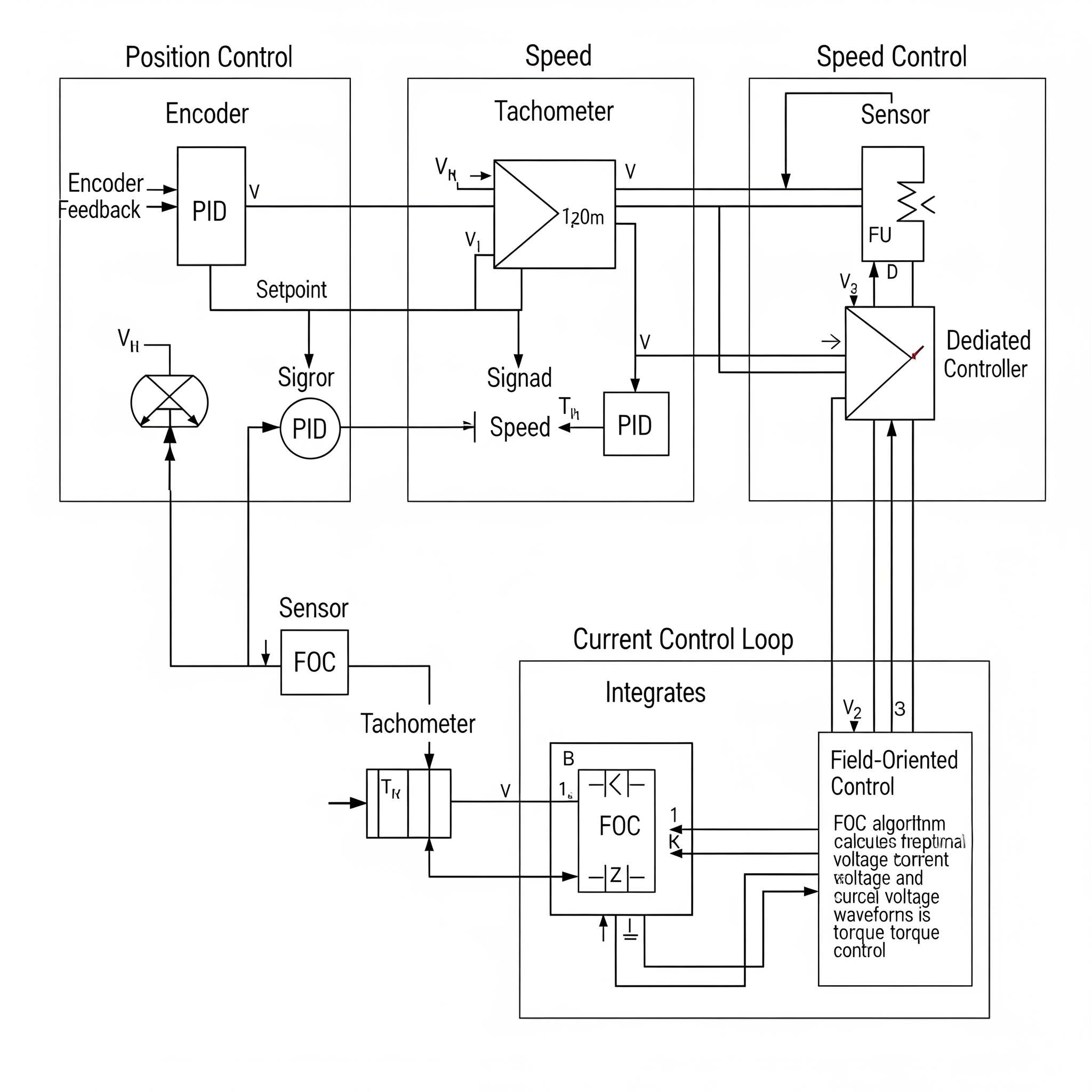
The "three common closed-loop modes" refer to the hierarchical control structure of a servo system, typically from the innermost to the outermost loop:
Current (or Torque) Closed-Loop: This is the most fundamental and fastest loop. It directly controls the current flowing through the motor windings, which in turn determines the motor's output torque.
Speed Closed-Loop: This loop regulates the motor's rotational speed. Its output acts as the command for the inner current loop.
Position Closed-Loop: This is the outermost loop, responsible for precisely controlling the motor's angular or linear position. Its output typically commands the speed loop.
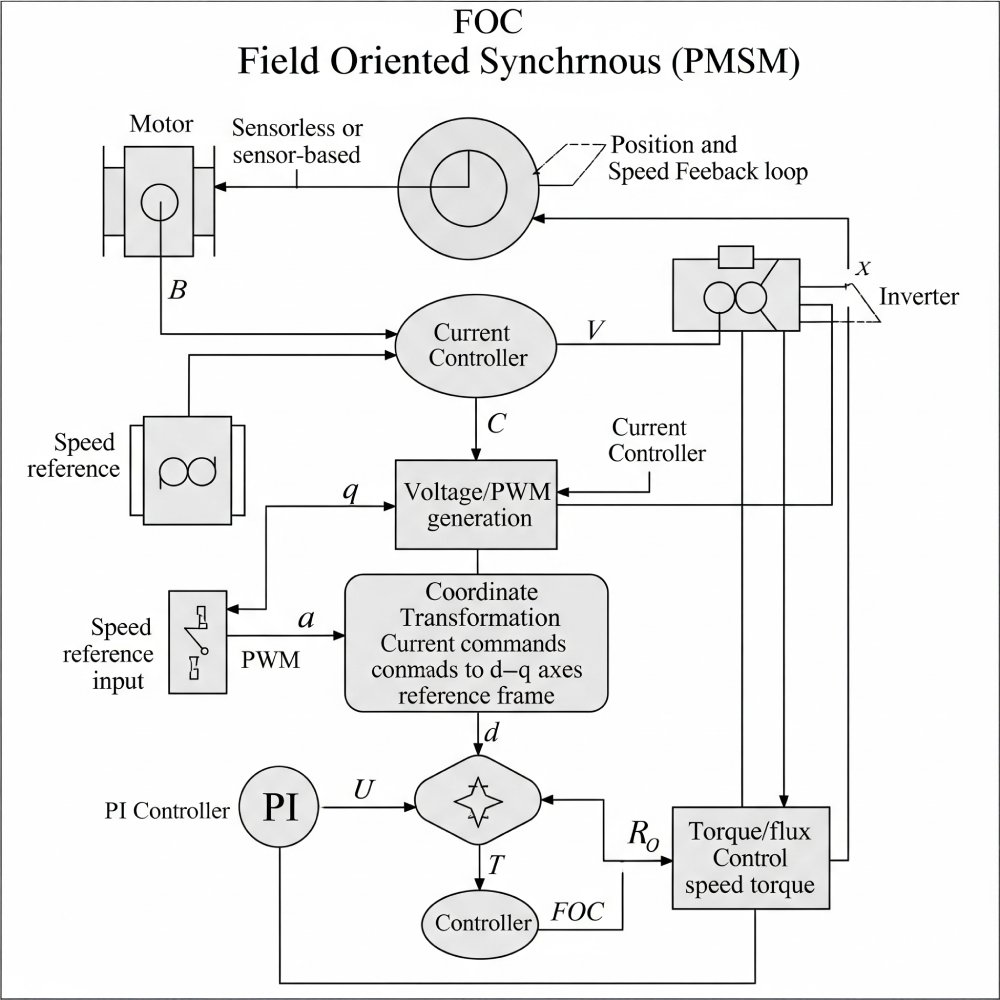
FOC (Field-Oriented Control), on the other hand, is a specific, advanced control algorithm or technique primarily used to implement the current/torque closed-loop for AC motors (like BLDC and PMSM).
Here's why they are related but not equal:
FOC enables high-performance current control: FOC's ability to decouple the magnetic flux and torque-producing components of the motor current allows for very precise and dynamic control of the motor's torque. This makes it the preferred method for the inner current loop in high-performance servo applications using BLDC or PMSM motors.
FOC is a part of the overall closed-loop structure: While FOC is crucial for the inner current loop, it doesn't encompass the speed or position loops itself. Those outer loops still require their own control logic (often PID controllers) that generate commands for the inner FOC-controlled current loop.
You can have closed-loop modes without FOC (but with limitations):
For brushed DC motors, the current/torque control doesn't typically use FOC. It's a simpler current regulation.
For AC motors, simpler control methods like V/Hz (Volts per Hertz) control can be used, but they offer significantly less precision, dynamic response, and efficiency compared to FOC, making them unsuitable for true "servo" applications.
In essence:
The three closed-loop modes (Position, Speed, Current/Torque) describe what is being controlled in a hierarchical manner to achieve servo performance.
FOC describes how the innermost current/torque loop is precisely controlled for AC motors to achieve that high performance.
So, when you hear about a "BLDC servo motor with FOC driver," it implies that the driver is using FOC to implement a highly effective current/torque closed-loop, which then forms the foundation for the outer speed and position closed-loops.
Recent post:
- 2024 The Year of Loong
- Humanoid Robots Steal the Show with Traditional Dance Performance at 2025 Spring Festival Gala
- Reversing or reciprocating screw
- The Realm of Motion: Unraveling the Mechanisms of Lead Screws, Ball Screws, Reversing Screw and Beyond
- Whirlwind Milling vs. CNC Milling for Screw Manufacturing and the Cost Implications for Different Screw Types