


6 DOF play robot arm
This is an assembled 6-axis robot arm / 6 DOF model using Servos and Arduino Controllers.
The robotic arm is a Hobby Model of ABB for education, demo and play only.
6pcs servos: 4pcs MG996 and 2pcs SG90
Arduino uno r3 controller, power supply
CNC Machined mechanical plastic parts
Note:
The actuator of 6 DOF robot arm is light duty RC servo and can Not be used to play with load.
Working continuously for hours is Not recommended because that the RC servo may get too hot or burnt.
The gear of the RC servos is Not anti-backlash, long time working the heat accumulation may burn the RC servos, continuously working over 10 hours the RC servos will get burnt. Normal and proper simulation of handling, placement and lifting process allow the Robot Arm having idle time to rest and the RC servos can get cooling.

Q & A:
What does six-axis robotic arm model do?
This Manipulator Model of ABB 6 DOF Robotic Arm is a scale model of the structure can be controlled by the NC actual ideas manipulator motion of the model for teaching experiment, focusing on action demonstrates, there is no actual work load capacity.
Material?
Manipulator model is PVC plastic sheet, processed by CNC. Bottlenecks in the power steering gear arm torque arm plates are not deformed steering gear has been unable, PVC plastic Yet another advantage is the ductility of the material is suitable for mosaic bearing, bearing connection to increase the accuracy of structural, mechanical all arm joints are connected to high-quality bearings.
Six-axis robot arm which is six degrees of freedom known as 6 DOF functioning similar with Scara, what about each axis angle range?
Manipulator six degrees of freedom:
a: 0-180 degrees waist
b: the boom arm size influence each other, the rotation angle range is variable
c: interaction forearm arm size, rotation angle range is variable
d: 0-180 degrees rotating arm
e: 0-180 degrees wrist
f: 0-180 degrees claw portion
(0 to 180 degrees is the theoretical value, the actual angle of between 5 to 175 degrees)
How accuracy the robotic arm is?
Because the power industry manipulator model is a model with the steering gear, steering gear for internal use ordinary reduction gear backlash performance wrists free travel around 4mm, suitable for teaching the theory of verification and control, is not suitable for industrial production lines.
Is it a assembly arm received?
After arm assembled, test, package, you will receive an assembled arm. A full six-axis manipulator factory pre-programming the video action to do the test, you can receive a manipulator plug movement, if you need it to do different actions, just reprogram.
Packing List
Six-axis manipulator model set includes:
Six-axis robot arm chassis (assembled including servos)
arduino uno r3 * 1
arduino expansion boards sensor shield v5.0 * 1
5V4A switching power supply 1 * Retrofit spare screws * 1 package
Unplugged program will work arm in factory pre-programmed motion video test
It will work as soon as it get electric power and pre-programmed, the action test as seen in video.
How to control six-axis or Scara
Arduino arm is microprocessor controlled, computer end arduino ide software in C programming language edit good arm action, upload via usb cable to the arduino microcontroller, arduino microcontroller can independently from the computer-controlled robot arm to complete the action. (Provided arduino tutorials and example code control). Control example code is similar to teaching mode control, computer-controlled robotic arm to move the path of the key points, record each axis angle, and then edit the angle value to instruction, teaching to achieve a similar pattern. If you used to do the reverse experiment can provide a reference code. Friends are not familiar with programming can download arduino ide software to become familiar with: arduino ide official website Download (Download page has the amount of sponsorship options, select the left "just download" download like): http: //arduino.cc/ en / Main / Software Development
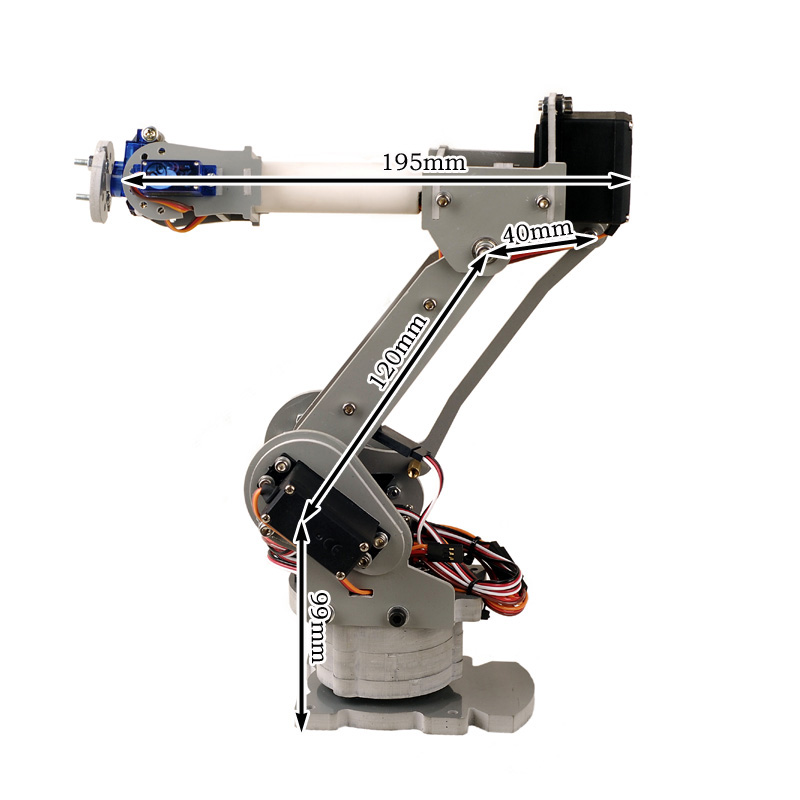
Six-axis robot arm
The use of waist and base servo coupling connections, because the internal base for supporting a very large fine bearing, within the overall steering arm also has bearings between two precision rotation axis with three V-shaped ditch struck three screws ways coaxial connectors.
Steering arm all custom made.
Servo wire wrist and forearm by the claw portion of the internal lead to the control board. A lot of arm provided with quality stainless steel hex screws. Sustainable produced new arm.
Comparison for RDG6 DOF & RDG460
1, 6 Degree of Freedom VS 4 degree of freedom
2, RDG460 Axis is more powerful than the six-axis, the disadvantage is that RDG460 cannot reach some angles, for example, inclined to the surface of the material. The advantage of a six-axis is that it can work at more angles, because of their complex structure, the power it can transmit would be less.
3,Customers manipulator model is mainly used to verify the actual application.
The RDG460 is for palletizing
The application of RDG 6-axis robot arm are more widely: welding, painting, assembling, sanding.







