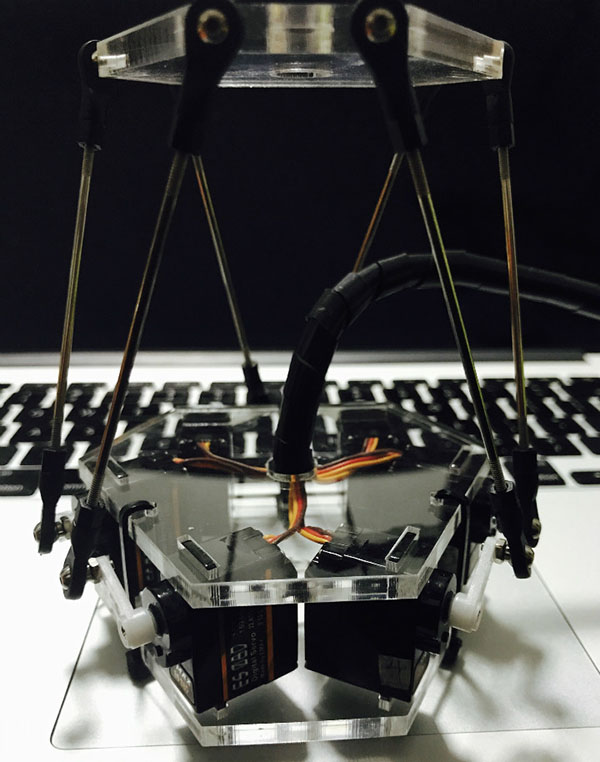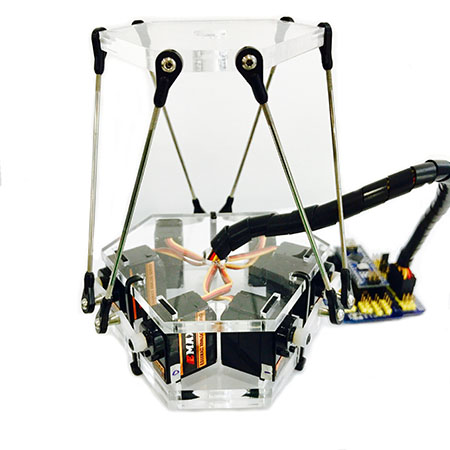
Hobby 6DOF Stewart Platform Educational Hexapod
Note: You need a 5VDC 2-3A power supply for the 6 RC servos.
Gamepad is sold separately, python example is available but it's Not provided for free 30USD extra, thanks.
5V 3A power supply adapter recommended for the Stewart platform
5V3A-micro-usb for 6DOF-PID-S
5V3A-5525 for 6DOF-PID-M
https://www.robotdigg.com/product/1743/

This is a Stewart platform model with 6 degrees of freedom, which can operate XYZ displacement, XYZ rotation, a total of six degrees of freedom, controlled by a 6-axis gyroscope. For study and study purposes only, it can be used for flight simulation, VR simulation, racing simulation, seismic simulation. The overall size is small and light, using a 12-gram steering gear, which is larger than the size of the palm. Because it is a DIY model, it is produced in spare time, and it is not refundable. It is used for learning references and model levels. If you need a hydraulic or electric cylinder, please see the parameters, the small model size.
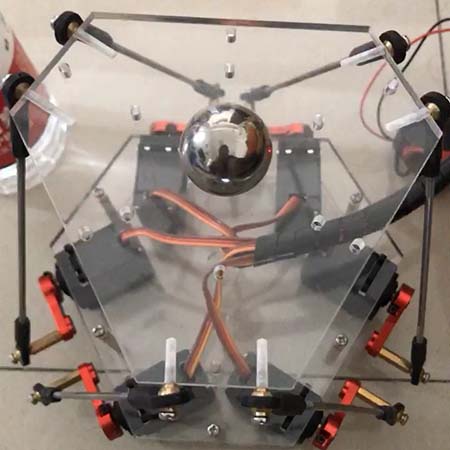
PID CONTROLLERS DESIGN APPLIED TO POSITIONING OF BALL ON THE STEWART PLATFORM (RobotDigg does Not have a copyright on this document, if you have the copyright and do Not want us to share it here please contact us and we will remove it immediately, thanks.)
Six degrees of freedom platform motion parameters:
6DOF-PID-S
Size: 180*180*180mm
Weight: 0.8Kg
Speed: 20mm/s
Motion Range:
X:±30mm
Y:±30mm
Z:±20mm
Roll: ±15°
Pitch:±15°
Yaw: ±30°
6DOF-PID-M
Size: 160*160*160mm
Weight: 0.8Kg
Speed: 20mm/s
Motion Range:
X:±42mm
Y:±42mm
Z:±32mm
Roll: ±20°
Pitch:±20°
Yaw: ±30°
Power requirement: USB 5V-1A, 2A or above is recommended, fast speed. The accessory does not have a power supply.
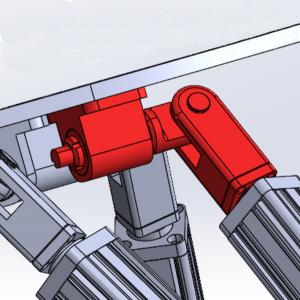
Overall: main body (6 servos, frame, connecting rod), motion control board, 6-axis gyroscope control board.
Source code is not provided.
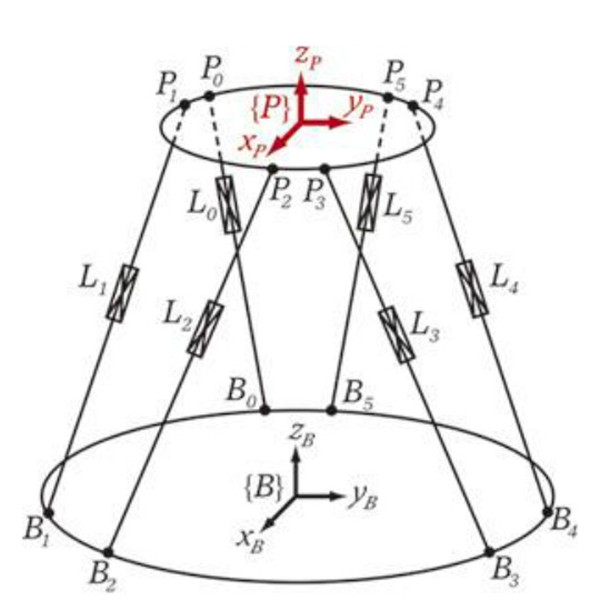
The Stewart platform parallel mechanism has become a research hotspot of space mechanism because of its large rigidity, strong bearing capacity and unacceptable position error. At present, Stewart platform parallel mechanism has been widely used in aviation, aerospace, subsea operations, underground mining, manufacturing and assembly industries. Although the practical application and theoretical research of parallel mechanisms have achieved a lot of research results, there are still some challenging problems in kinematics, singularity and dynamics. For example, the solution of the Jacobian matrix with less degrees of freedom parallel mechanism is not yet available. A unified method; seeking an algorithm that can find all the solutions of the positive solution of the parallel mechanism position; seeking a solution to the efficient inverse dynamic problem. The Jacobian matrix is a major component of the Stewart platform parallel mechanism, which represents a mapping from the input joint to the end effector output.